



Opis
Spec:
- CAN-L431 is an Adapter Node based on ArudPilot AP_Periph firmware.
- With this board, you can easily utilize the ArduPilot driver library to convert ArduPilot supported GNSS, Compass, Barometer,Airspeed sensor, and GPIO based (PWM, Buzzer/LED notify) peripherals to DroneCAN bus peripherals.
Specifications
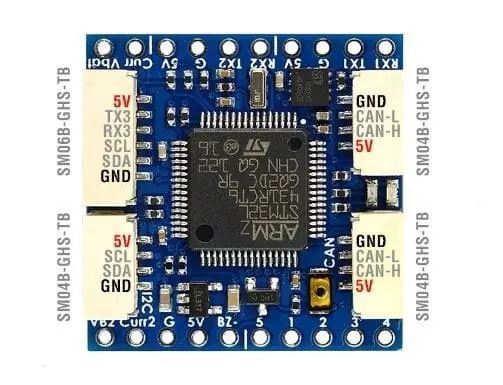
- MCU: STM32L431xC, 256KB Flash
- CAN transceiver data rates up to 5 Mbit/s in the CAN FD fast phase
- 1x CAN, DroneCAN Protocol (2x GH-4P connectors in parallel)
- 3x UARTs
- UART1, spare
- UART2, MSP default, DFU
- UART3, GPS default
- 1x I2C
- for peripheral Airspeed sensor
- for peripheral Barometer
- for peripheral Compass QMC5883L
- 1x SPI
- for peripheral RM3100
- 4x ADC
- BATT_VOLT, PIN 5
- BATT_CURR, PIN 6
- BATT2_VOLT, PIN 15
- BATT2_CURR, PIN 16
- 5x PWM outputs
- 1x GPIO with TIM16 for buzzer
- ST debug, SWCLK & SWDIO
- LED
- Blue, Fast blinking, Booting
- Blue, Slow blinking, working
- Red, 3.3V indicator
- Input voltage range: 4.5~5.5V @5V pad/pin
- Power consumption: 40mA
- Operating Temperatures: -20~80 °C
- Physical
- 2x JST-GH-4P(SM04B-GHS-TB) for CAN
- 1x JST-GH-4P(SM04B-GHS-TB) for I2C
- 1x JST-GH-6P(SM06B-GHS-TB) for UART3+I2C
- Board Size: 26mm*26mm*6mm. 3.7g
- 3D file : CAN-L431_STEP.zip
- Firmware
- ArduPilot AP_Periph MatekL431-Periph, or MatekL431-Airspeed
- Update via DroneCAN GUI Tool
Packing
- 1x CAN-L431 board
- 1x JST-GH-4P to JST-GH-4P 20cm silicon wire
- 1x JST-GH-6P to JST-GH-6P 20cm silicon wire
Parameter:
Parameters in Flight controller
- CAN_D1_PROTOCOL = 1
- CAN_P1_DRIVER = 1
- GPS_TYPE = 9 DroneCAN
- COMPASS_TYPEMASK DroneCAN (Unchecked)
- ARSPD_TYPE = 8 (DroneCAN)
- NTF_LED_TYPE -> DroneCAN (Checked)
Tips
- MatekL431-Periph firmware support I2C compass QMC5883L by default
- If you connect other I2C compass to this board, you need to update it with this firmware http://www.mateksys.com/Downloads/FW/AP_Periph_MatekL431_ALL_I2C_MAG.bin via DroneCAN GUI or SLCAN mode in Mission Planner.
PWM Outputs
Tutorial Using MatekL431 adapters for PWM and DShot:
https://discuss.ardupilot.org/t/using-matekl431-adapters-for-pwm-and-dshot/85781



